





„Dezvoltarea unei mâini robotizate care are componente dure și moi, la fel ca mâna umană, este un subiect de cercetare pe care am vrut să-l explorez de ani de zile”, a declarat pentru TechXplore Maryam Tebyani, unul dintre cercetătorii care au efectuat studiul. „Combinarea materialelor elastice și inelastice ar aborda un punct important în robotică, în cazul în care sistemele flexibile pot face față destul de greu obiectelor grele, în timp ce sistemele rigide pot necesita un control complex, pentru a obține o dexteritate comparabilă cu mâna umană”, a adăugat el.
Obiectivul principal al lucrării recente a fost crearea unei mâini robotizate inspirate de sistemele naturale. Cu toate acestea, cercetătorii au dorit să-și concentreze majoritatea eforturilor în proiectarea mâinii artificiale, mai degrabă decât în fabricarea și asamblarea acesteia. Astfel, au decis să profite de metodele de imprimare 3D de ultimă generație, care ar putea simplifica și accelera procesul de producție generală a prototipurilor.
 1 / Sursa:playtech.ro
1 / Sursa:playtech.roRoboții, din ce în ce mai umani
„Utilizarea tipăririi 3-D în procesul de proiectare ne-a dat libertatea de a dezvolta structuri tridimensionale de tendon și ligamente, permițându-ne totodată crearea unui robot condus prin cablu într-un singur tipar”, a explicat Tebyani. „Materialele de imprimare visco-elastice au încorporat flexibilitatea mecanică pe care o căutam, deoarece acestea permit producerea unor comportamente pasive cu adevărat interesante. În esență, acest proces permite utilizarea proiectării mecanice pentru a programa anumite funcții în robot”, a explicat acesta.
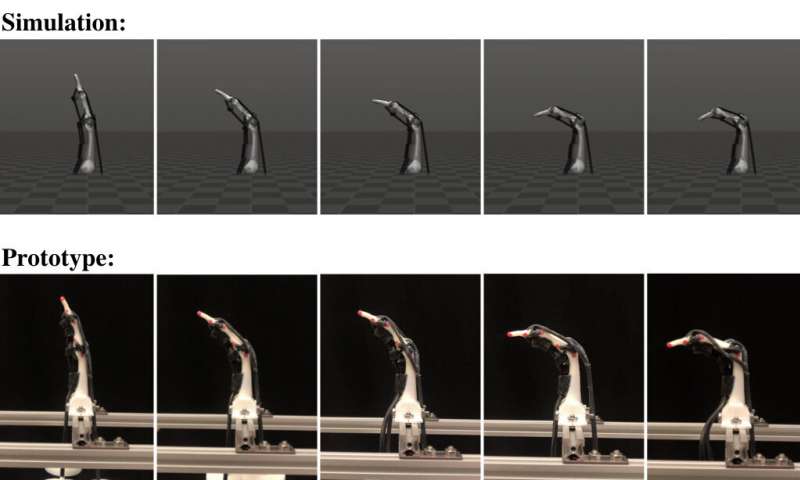
Degetul robot conceput de cercetători are o geometrie osoasă, structuri de ligamente, mușchi artificiali și tendoane viscoelastice care seamănă cu ceea ce au oamenii. Toate aceste componente au fost sintetizate ca o singură parte, folosind o imprimantă 3D. De asemenea, Tebyani și colegii ei au dezvoltat un model de deget folosind un popular motor de simulare pentru fizică, numit MuJoCo. Acest lucru le-a permis să compare rezultatele obținute de degetul lor robotizat în simulări cu cele obținute de un prototip imprimat al degetului în setările lumii reale.
Rezultatele obținute de cercetători în experimentele lor sunt extrem de promițătoare, subliniind potențialul imens de a combina tehnici de imprimare și simulare 3D pentru a crea sisteme robotice complexe și a obține un control mai mare asupra acestor sisteme. Metodele pe care le-au folosit le-au permis fuzionarea folosirii materialelor visco-elastice omniprezente în robotică și practicile de robotică mai tradiționale, ceea ce a dus la o reproducere mai atentă a structurii endoscheletului uman.
Un început promițător pentru a crea roboți cu funcții cât mai apropiate de realitate
„Procesul de proiectare pe care ni l-am propus ne permite să scalăm geometria și proprietățile materialului fiecărui element din proiectele noastre robotice pentru a se potrivi cu oameni individuali și pentru a produce rapid acele prototipuri prin asamblare autonomă”, a spus Tebyani. „Protetica de ultimă generație și robotica tele-operată au făcut progrese interesante în interfațarea cu utilizatorii umani. Încercăm să ajutăm acest progres prin proiectarea de platforme, care sunt o extensie naturală a formei umane, iar modelele personalizabile sunt integrate în realizarea acestui lucru”, a explicat omul de știință.
În prezent, echipa lucrează la extinderea acestui design la întreaga mână și la încheietură, pentru a permite manipularea obiectelor. „De asemenea, avem planuri de a dezvolta modele care se bazează pe o variație a metodei de fabricație prezentată, astfel încât aceste sisteme să poată fi realizate cu ajutorul imprimantelor 3D care sunt mai accesibile pentru alți roboți”, a spus Tebyani.
În viitor, procesul de proiectare și fabricație folosit de această echipă de cercetători ar putea fi aplicat la crearea mai multor structuri robotice bio-inspirate, cum ar fi alte membre umane sau inspirate de animale. În plus, degetul biomimetic pe care l-au realizat ar putea fi folosit pentru a dezvolta o mână robotizată, care ar putea fi apoi atașată atât la roboții existenți, cât și la cei noi.
































Potrivit legislației, suntem obligați să cenzurăm comentariile ce incită la ură, reprezintă atac la persoană sau conțin cuvinte necenzurate.
Vă îndemnăm la discuții decente!